
RCV-Pioneer Mobility, Counter-Mobility and Survivability on demand for Remote and Autonomous Vehicles (sponsored)
How Robotic Combat Vehicles (RCVs) will be deployed is still a matter of discussion, with a trend towards lighter, nimbler, and more multi-purpose vehicles able to undertake a multitude of roles independently.




This article is brought to you by Pearson Engineering
RCVs look set to take a prominent position in the configuration of military land forces in future conflict, progressively taking humans away from ‘dull, dangerous and dirty’ tasks, and affording skilled personnel the time and safety to outwit adversaries.
Regardless of mission, the fact remains, that these vehicles will need to move to places of their Commander’s choosing and in doing so, will need to defeat the wide range of natural and deliberate obstacles usually encountered on the battlefield. An RCV without protection may still be subject to enemy action, if not to injure soldiers, but to stop valuable assets in their tracks.
RCV-Pioneer – Scalable Battlefield Mobility
In response, Pearson Engineering has developed RCV-Pioneer, a new approach to the integration of mobility, counter-mobility and survivability equipment for robotic vehicles. Based on the same core principles of rapid interchangeability and agility, which are present throughout Pearson Engineering’s product range, RCV-Pioneer provides remotely controlled engineering capability to RCVs. This allows such vehicles to scale and optimise for the task at hand, whether to support its own mobility, or to provide an engineering effect for others.
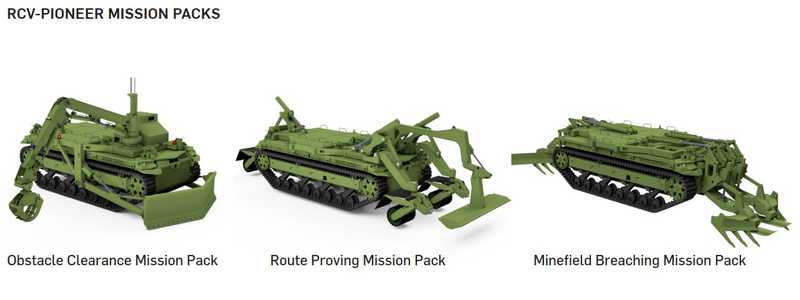
It is a self-contained, pre-configured frame to which Pearson Engineering’s combat engineering equipment can be integrated to support specific missions. Such equipment is provided by palletised Mission Packs including capability for obstacle clearance, route proving, minefield breaching and assault gap crossing which can be rapidly swapped out in field conditions.
RCV-Pioneer uses an innovative self-lifting system to allow RCVs to rapidly manoeuvre underneath mission packs for rapid integration and removal. RCV-Pioneer mounts to the host platform using quick release fastenings, which require no tools to operate, allowing it to be rapidly fitted and removed from the RCV. The system design will allow two soldiers to fit or remove RCV-Pioneer from the RCV in approximately 30 minutes.
RCV-Pioneer does not require any hydraulic power from the host platform and comprises all the required hydraulic controls for its mission specific tools such as ploughs, dozer blades and excavator arms. It can either take electrical power from the host RCV platform or generate all required power using an integral diesel engine.
The RCV-Pioneer Mission Packs are remotely controlled using an intuitive Operator Control Unit (OCU) which includes joysticks and touch screen controls to manage all of its functions. The OCU displays video feeds from cameras mounted on RCV-Pioneer to give optimal situational awareness whilst performing engineering tasks.
Mission Packs – Pioneering Products, Proven on the Battlefield
For nearly 40 years, Pearson Engineering has provided equipment to help Armed Forces to defend, move and flight. Our products enable combat forces to breach minefields, to overcome explosive ordnance and to defeat and create obstacles. They are designed to provide armoured vehicles with the ability to rapidly adapt to their mission, to overcome challenges to mobility and to deny mobility and momentum to others.
The same approach has been applied to RCVs with mission packs optimised, in the same way as Front-End Equipment (FEE), to deliver against mobility, counter-mobility and survivability tasks.
Manoeuvre Support Sustainment and Protection Integration Experiments (MSSPIX)
A prototype version of RCV-Pioneer + Obstacle Clearance Mission Pack was recently trialled on the General Dynamics Land Systems (GDLS) TRX RCV. It included a manipulator arm capable of lifting objects up to 500kg (1100lbs), a V-shaped dozer blade for moving obstacles, and an area which is designed to carry a variety of different loads. This capability was successfully demonstrated to the US Army at the Manoeuvre Support Sustainment and Protection Integration Experiments (MSSPIX) 2021 at Fort Leonard Wood. A Mine Clearing Line Charge (MICLIC) frame was fitted to the flexible load area for the MSSPIX trial to show an additional capability which could be added in the future.




More from Industry Spotlights
-
![With a wave of upgrades, the MQ-9B is ready for high-tech warfare]()
With a wave of upgrades, the MQ-9B is ready for high-tech warfare
The modern battlefield is evolving rapidly — threats range from stealthy cruise missiles to coordinated drone swarms. General Atomics Aeronautical Systems, Inc. (GA-ASI) is meeting these challenges head-on with a series of transformative upgrades to its MQ-9B SkyGuardian® and maritime SeaGuardian® remotely piloted aircraft.
-
![The speed of relevance: how companies can navigate the new era of European defence procurement]()
The speed of relevance: how companies can navigate the new era of European defence procurement
European militaries face a rapidly evolving security landscape and defence production must accelerate to meet surging demand for platforms and equipment. Industry needs to adapt to ensure it gets its products into the hands of the end user, Evelyn Rafferty, Senior Director Aerospace and Defence - Europe at Plexus told Shephard’s Gerrard Cowan.
-
![Patria TRACKX: Designed to conquer the most challenging environments]()
Patria TRACKX: Designed to conquer the most challenging environments
The tracked all-terrain armoured vehicle Patria TRACKX is a promise of performance. It is engineered to navigate the toughest terrain silently and swiftly, ensuring smooth operations in any conditions.
-
![“A staggering rate of change”: how experience combating IEDs is being applied to the C-UAS arena]()
“A staggering rate of change”: how experience combating IEDs is being applied to the C-UAS arena
The scale of the current escalation in drone attacks is fuelling demand for C-UAS technology that must address a rapidly evolving and expanding threat. Against this background, important lessons can be learned from the battle against IEDs, with networked responses and dispersed capabilities essential to deliver enduring protection.
-
![Agile, sovereign, edge-ready: rewiring defence IT for a contested decade]()
Agile, sovereign, edge-ready: rewiring defence IT for a contested decade
Today's rapidly changing security landscape means that armed forces can no longer treat their data in the same way as in the past. What are the key challenges they face, and how can industry help them?
-
![The science of soldier safety: How Team Wendy Is reinventing the modern military helmet]()
The science of soldier safety: How Team Wendy Is reinventing the modern military helmet
When soldiers head into the field, the helmet on their head can mean the difference between life and death. But while helmets may look simple from the outside, the technology inside them is anything but. Few companies illustrate this better than Team Wendy, whose newest bump helmet — the RECON™ Tactical — shows just how far modern head protection has come.














